Bir düğmeye bastığınızı ve ağır makinelerin mükemmel bir güç ve pürüzsüzlükle hareket ettiğini hayal edin. Şimdi, bir fabrikada çelik bir plakayı kaldırmanız veya ağır bir paketi bir konveyör boyunca her zamankinden daha hızlı itmeniz gerektiğini düşünün. Daha yüksek doğruluk, daha az manuel efor ve daha yüksek manipülasyon için otomasyon mu istiyorsunuz? Her şey, tam olarak ne kadar ton kuvvet ve hız istediğinizi anlamak ve bunları hesaplamanın bir yolunu bulmakla başlar. Bunu yanlış yaparsanız, üretim hattınız durabilir, elemanlar bozulabilir ve ayrıca elektrik ve para israf edersiniz. Öyleyse, bu sayıları doğru hesaplamanın ne kadar kolay olduğunu görelim.
Elektrikli Silindirleri Anlamak: Doğrusal Hareket Kontrolünün Temeli
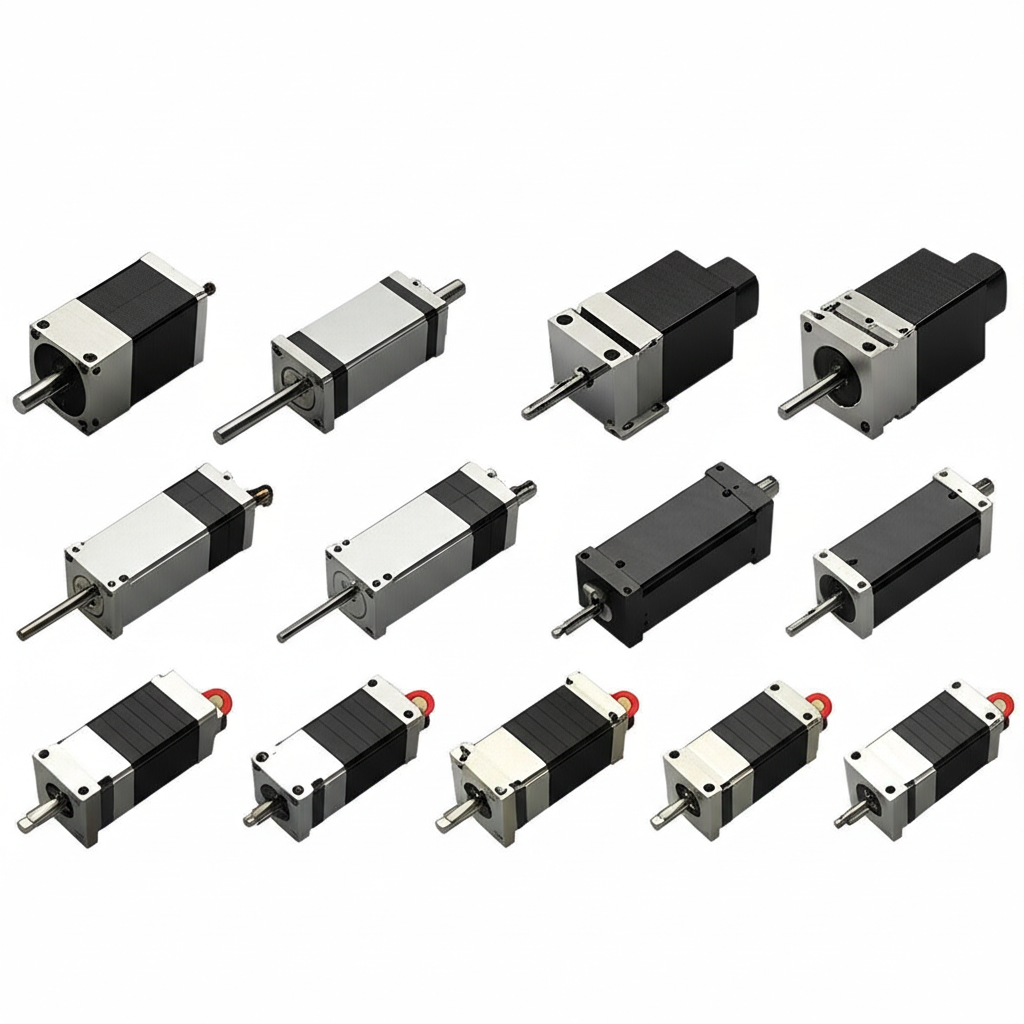
Bir elektrikli silindir elektrik enerjisini düz hat hareketine dönüştürür. Buna itme çubuğu, aktüatör veya elektrikli piston diyebilirsiniz. İçinde basit ancak akıllı parçalar vardır: etkili bir motor (servo veya step motor olabilir), bir kılavuz vida (sağlam bir metal spiral gibi), bir somun, kapaklar ve bazen hareketi daha da pürüzsüz veya daha güçlü hale getirmek için bir dişli kutusu.
Neden bu kadar çok mühendis ve teknoloji uzmanı artık eski tip hidrolik veya pnömatik sistemler yerine elektrikli silindirler kullanıyor? Yeni başlayanlar için, elektrikli silindirler
- Yerleştirme, hız ve kuvvetin doğru kontrolü
- Enerji etkinliği (sadece ihtiyacınız olan gücü kullanırlar).
- Temiz prosedür (damlayan yağ veya tıslayan hava yok).
- Daha az bakım.
Anahtar? Elektrik motoru, bir vidayı dönüştürür gibi kılavuz vidayı döndürür ve somun yukarı veya aşağı hareket eder. Bu dönme hareketi doğrudan kuvvete dönüşür - ihtiyacınız olan şeyi, özellikle ihtiyaç duyduğunuz yere taşır.
Elektrikli Silindir Kuvvet Hesaplamasının Yapısını Çözme: Formüller ve Faktörler
Nedir bu? kuvvet Burada mı? "İtme kuvveti "ni düşünün - silindirin ne kadar itme veya çekme kuvveti verdiğini. Ancak tüm kuvvetler aynı değildir:
- Statik kuvvet: Bir yükü yerinde tutmak için gereken kas gücü (bir kapıyı açık tutmak gibi)
- Dinamik güç: Bir şeyi hareket ettirmek için gereken kas (sürtünmenin üstesinden gelmek, hız veya kaldırma)
Gerekli Tüm Kuvvet Bileşenlerinin Belirlenmesi
Bir aktüatörü boyutlandırmadan önce veya elektrikli silindirtüm bu parçaları toplayın:
- Yük Kuvveti (F_load): Bu sadece hareket ettirdiğiniz ağırlık veya kütledir. Dikey olarak kaldırırsanız, bu tam ağırlıktır. Yana doğru hareket için daha azdır, ancak sürtünme daha önemlidir.
- Sürtünme Kuvveti (F_friction): Sürtünme, bir kutuyu zemin üzerinde kaydırmaya çalışmak gibidir. Formül kolay:
F_sürtünme = µ × F_normal
Burada µ sürtünme sayısıdır (başlangıç için statik veya hareket için kinetik) ve F_normal normal kuvvettir (genellikle nesnenin ağırlığı).
- İvme Kuvveti (F_acceleration): Hızlı bir başlatma veya durdurmaya mı ihtiyacınız var? Ekstra güce ihtiyacınız olacak:
F_ivme = m × a
(m kütle, a hızı ne kadar hızlı değiştirdiğinizdir)
- Dış Güçler: Yayları, rüzgarı ya da diğer itme ve çekme kuvvetlerini unutmayın.
Gerekli Toplam Kuvvet ve Motor Torku için Temel Formüller
Bunları topla:
- F_total = F_load + F_friction + F_acceleration (+ F_external)
- Kuvvetten motorun ihtiyaç duyduğu kasa ulaşmak için (tork):
F_thrust = (T_motor × 2 × π × η) ÷ P_screw
Nerede?
- T_motor: motor torku
- η: kurşun vida verimliliği
- P_screw: kurşun vida adımı
Kurulumunuz bir dişli kutusu kullanıyorsa, motor ve vidanın aynı dili konuşması için dişli oranını ayarlayın.
Sistem Verimliliği ve Güvenlik Faktörlerinin Kritik Rolü
Gerçek dünyada hiçbir şey 100% mükemmel değildir. Bilyalı vida verimliliği (η) boşa harcanan hareketin bir ölçüsüdür:
- Vidalı miller: genellikle 85-95% verimli
- Acme vidaları: genellikle 20-50% verimli
Gizli yükler veya ani şoklar konusunda emin değil misiniz? Kullanın güvenlik faktörü:
- Sektör en azından şunları önermektedir 1.2-2.0× hesaplanan gücünüz
- Bu, ömrü uzatır ve işler zorlaştığında sürprizlerle karşılaşılmasını önler (kaynağa bakınız)
Elektrikli Silindir Hız Hesaplamasında Uzmanlaşma: RPM'den Doğrusal Hıza
Hız, otomasyon sisteminizin işini ne kadar hızlı yaptığını belirler. Başka bir deyişle, aktüatör ne kadar hızlı itiyor veya çekiyor?
Hassas Hız Belirleme için Temel Değişkenler
Hız şunlara bağlıdır:
- Motor Dönüş Hızı (RPM): Motorun dakikada ne kadar hızlı döndüğü
- Kılavuz Vida Aralığı (P_screw): Somunun bir tam turda ne kadar kaydığı
- Şanzıman Oranı: Dişli kullanırsanız, çıkışı yavaşlatabilir veya hızlandırabilir
Doğrusal Hız Hesaplaması için Temel Formüller
İşte basit hesap:
- Doğrusal Hız (V_linear) = (Motor RPM × P_screw) ÷ 60
- Vitesli:
V_linear = ((Motor RPM ÷ Dişli_oranı) × P_screw) ÷ 60

Unutmayın: hızlı değişimler (hızlanma ve yavaşlama) ortalama hızı değiştirir, bu nedenle sisteminizi boyutlandırırken buna yer bırakın.
Pratik Uygulama: Adım Adım Hesaplama Örnekleri
Hepsini bir araya getirelim.
Örnek 1: Dikey Asansör
- Yük: 200 kg (yaklaşık 1962 N, çünkü 1 kg = 9,81 N)
- Kılavuz vida adımı: Dönüş başına 5 mm
- Motor devri: 1200
- Vidalı mil verimliliği: 90%
- Sürtünme: 0.1 (yağlanmış)
- Tam hıza 2 saniyede ulaşmak için hızlanma
Toplam Kuvveti Hesaplayın:
- F_load = 200 kg × 9,81 m/s² = 1962 N
- F_sürtünme = 0,1 × 1962 N = 196,2 N
- F_ivme = 200 kg × (son hız ÷ 2 s). Diyelim ki 2 s içinde 100 mm hareket etmek istiyoruz:
Son hız = 100 mm ÷ 2 = 50 mm/s = 0,05 m/s
İvme = 0,05 m/s²
F_ivme = 200 × 0,05 = 10 N
- F_toplam = 1962 + 196,2 + 10 = 2168.2 N
Tork Gerekli:
- P_screw = 5 mm = 0,005 m
- T_motor = (F_thrust × P_screw) ÷ (2 × π × η)
T_motor = (2168,2 × 0,005) ÷ (2 × 3,14 × 0,9) ≈ 1,92 Nm
Doğrusal Hız:
- V_lineer = (1200 × 5) ÷ 60 = 100 mm/s
Örnek 2: Yatay İtme
- Yük: 100 kg (981 N)
- Sürtünme (kuru çelik): 0.7
- P_vida: 10 mm
- Motor devri: 600
F_sürtünme = 0,7 × 981 = 686.7 N
Toplam kuvvet = 981 + 686,7 = 1667.7 N
T_motor = (1667,7 × 0,01) ÷ (2 × 3,14 × 0,9) ≈ 2,95 Nm
Hız = (600 × 10) ÷ 60 = 100 mm/s
Senaryonuz için daha derin bir dalışa mı ihtiyacınız var? Gibi araçlar Çin Elektrik Silindir Fabrikası tüm uygulamalar için kılavuzlar ve hesaplayıcılar sunar.
Optimum Boyutlandırma ve Performans için Önemli Hususlar
Görev döngüsü-aktüatörünüz için açma/kapama süresi- düşündüğünüzden daha önemlidir. Yüksek bir görev döngüsü motorun aşırı ısınmasına neden olarak ömrünü kısaltabilir (Bosch Rexroth'un yorumunu okuyun). Her zaman motorun gücünü kontrol etmelisiniz. tork-hız eğrisiBöylece yüksek hızlarda güç kaybetmez veya kendini pişirmez (daha fazlasını burada bulabilirsiniz).
Diğer detaylar:
- Termal yönetim: Özellikle yoğun kullanımda işleri serin tutun.
- Doğruluk: Robotlar veya test ekipmanları için tekrarlanabilirlik çok önemlidir.
- Ömür boyu: Yükler ve hız, vidaları ve yatakları hızla aşındırabilir.
- Çevre: Toz, yağmur veya ısı, hangi parçaların en iyi şekilde çalışacağını değiştirir. Paslanmaz çelik veya su geçirmez seçenekleri göz önünde bulundurun.
Daha fazla ayrıntıya mı ihtiyacınız var? Zorlu ortamlar için aşağıdaki gibi özel modellere göz atın Su Geçirmez Lineer Aktüatörler veya Paslanmaz Çelik Aktüatörler.
Elektrikli Silindir Boyutlandırması için Temel Veri Öngörüleri
| Parameter | Tipik Değerler / Notlar |
|---|---|
| Bilyalı Vida Verimliliği (η) | 85%-95% (kaynak: Thomson Lineer) |
| Acme Vida Verimliliği | 20%-50% |
| Sürtünme Katsayısı Çelik | 0.7 (kuru), 0.1-0.2 (yağlanmış) (Mühendislik Araç Kutusu) |
| Güvenlik Faktörü | 1.2-2.0 |
| Genel Motor Boyutlandırması | Yükü, hızı ve özellikle görev döngüsünü kontrol edin |
SSS (Sıkça Sorulan Sorular)
Bir elektrikli aktüatörün kuvvetini nasıl hesaplarsınız?
Yük, sürtünme ve ivme kuvvetlerini toplayın. Kullanım F_total = F_load + F_friction + F_acceleration.
Elektrikli silindir kuvvetinin formülü nedir?
Yukarıdaki formülü kullanın. Tork için, F_thrust = (T_motor × 2 × π × η) ÷ P_screw.
Elektrikli aktüatör hızını nasıl hesaplarsınız?
Motor devrini kurşun vida adımı ile çarpın; V_linear = (RPM × Hatve) ÷ 60.
Elektrikli silindir kuvvetini ve hızını etkileyen faktörler nelerdir?
Yük, sürtünme, ivme, kılavuz vida tipi, motor torku ve hatve.
Bir uygulama için elektrikli silindir nasıl boyutlandırılır?
Tüm kuvvetleri listeleyin, bir güvenlik faktörü ekleyin, hızı kontrol edin ve bunları silindirin özellikleriyle eşleştirin.
Elektrikli silindir ile pnömatik silindir arasında kuvvet açısından ne fark vardır?
Elektrikli silindirler hızı ve kuvveti hassas bir şekilde kontrol eder. Pnömatik silindirler hava basıncına ihtiyaç duyar ve daha az hassas olabilir.
Bir elektrikli lineer aktüatör ne kadar kuvvet üretebilir?
Bu, tasarıma bağlıdır - bazı Jimi silindirleri 30 tonun üzerinde iter!
Elektrikli silindirlerde vida ucu (hatve) nedir ve hesaplamaları nasıl etkiler?
Hatve, dönüş başına hareket ettirilen mesafedir - daha büyük hatve = daha yüksek hız, daha düşük kuvvet.
Doğrusal bir aktüatör için gereken motor torkunu nasıl hesaplarsınız?
T_motor = (F_thrust × P_screw) ÷ (2 × π × η).
Vidalı milin verimliliği nedir ve neden önemlidir?
Vidalı miller 85-95% verimlidir, yani yükünüzü hareket ettirmek için daha fazla güç harcanır, ısı olarak boşa harcanmaz.
Sonuç ve Sonraki Adımlar
Elektrikli silindirleri doğru kullanmak için net bir matematiğe ve gerçek dünya bilgeliğine ihtiyacınız vardır. Jimi'de, maliyetli hatalar yapmamanız için onlarca yıllık deneyimi, en iyi üretimi ve ayrıntılı kılavuzları bir araya getiriyoruz. Ekstra destek için Elektrikli Silindirler Sayfa, Servo Motor Aktüatörleri, veya Bilyalı Vidalı Aktüatörler. Zorlu hareket kontrol fikirlerini güvenilir sonuçlara dönüştürmenize yardımcı olması için Jimi'ye güvenin.
Neye ihtiyacınız olduğundan emin değil misiniz? Bize ulaşın ve Jimi'nin uzmanlarının her adımda size yol göstermesine izin verin; çünkü kuvvet ve hızı doğru ayarladığınızda otomasyonunuz gerçekten hareket eder.