Vous voulez des mouvements fluides. Vous voulez une petite taille. Vous voulez une grande puissance. J'ai compris.
Je vous aide à construire des machines rapides, sûres et intelligentes. Je simplifie le mouvement. Je fais en sorte que le mouvement soit correct.
Je suis Jimi Technology Co. Je dirige actionneurs linéaires, Ascenseurs TV, et systèmes d'automatisation. Mon matériel tourne énergie électrique en mouvement rectiligne. Vous appuyez sur un bouton. Les choses augmenter, inférieur, pousser, tirer, ou inclinaison. Je ne suis pas seulement un vendeur. Je suis un expert. Je suis un fournisseur de solutions. Je suis un autorité de confiance. Vous pouvez compter sur moi.

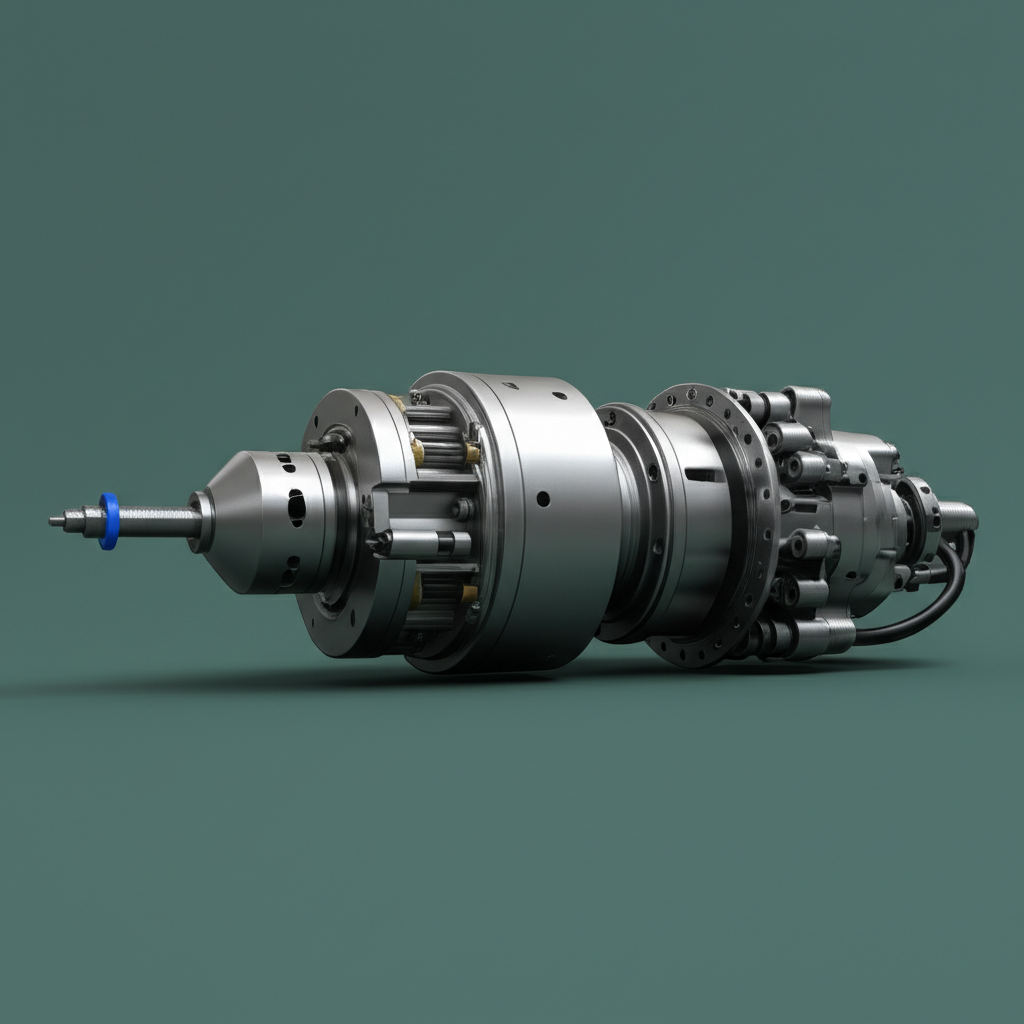
Qu'est-ce qu'un moteur sans cadre ?
- Il est composé de deux parties. A stator et un rotor.
- Pas de boîtier. Pas d'arbre. Pas de roulements.
- Vous le mettez directement dans votre machine.
- Il est entraînement direct. Il a pas de réaction brutale.
- Il peut être BLDC ou PMSM.
- Il peut être sans fente ou enroulement distribué.
- Il peut avoir une arbre creux. Vous pouvez y faire passer des fils.
- Il peut avoir nombre élevé de pôles pour une sensation de douceur.
- Il apporte densité de couple élevée dans un conception compacte du moteur.
- Il réduit poids et taille. Il permet d'économiser espace.
Qu'est-ce qu'un encodeur ?
- C'est un œil minuscule. Il indique position et vitesse.
- Il peut être absolu. Vous savez, c'est parfait dès la mise en route.
- Il peut être incrémentale. Vous comptez les pas.
- Il peut être optique, magnétique, ou inductif.
- Il peut utiliser capteurs à effet Hall.
- Il peut envoyer numérique ou analogique sortir.
- Il peut parler BiSS, SSI, Sin/Cos, ou quadrature A/B/Z.
- Il conduit contrôle en boucle fermée avec PID ou FEU.
Pourquoi les réunir ?
- Vous obtenez positionnement de précision et répétabilité.
- Vous obtenez réponse dynamique élevée avec démarrage et arrêt rapides.
- Vous obtenez faible couple de cogging. Les mouvements sont soyeux.
- Vous coupez complexité mécanique. Pas de courroies. Pas de jeu dans les engrenages.
- Vous améliorez gestion thermique. La chaleur circule vers votre cadre.
- Vous soulevez fiabilité et MTBF.
- Vous frappez espaces restreints avec moteur peu encombrant kits.
Je l'intègre dans le système smart composants de l'actionneur. I paire servomoteur sans cadre kits avec systèmes de rétroaction des codeurs. Je les dimensionne avec courbes de performance, caractéristiques du couple et de la vitesse, couple continu, couple maximal, constante de couple (Kt), constante de force contre-électromotrice, résistance du bobinage, inductance du bobinage, inertie du rotor, résistance thermique, et plage de température de fonctionnement. Je conçois pour Blindage EMI, classe d'isolation, protection de l'environnementet le droit Indice de protection IP.
La promesse qui vous est faite
- J'attire votre attention. Petit moteur. Grande poussée. Un look épuré.
- Je souligne le besoin. Vous voulez précision. Vous voulez la sécurité. Vous voulez vitesse.
- Je réponds aux besoins. Je construis selon vos spécifications. Je teste. Je prouve.
- Je positionne mon produit comme votre solution. Je l'adapte. Je le fais fonctionner. Je le soutiens.
Les avantages en un coup d'œil
| Fonctionnalité | Ce que cela signifie | Votre victoire |
|---|---|---|
| Densité de couple élevée | Plus de couple dans moins d'espace | Une machine plus petite mais plus puissante |
| Entraînement direct | Pas de jeu dans les engrenages | Pas de réaction brutale et un mouvement fluide |
| Encodeur intégré | Position et vitesse en temps réel | Précision contrôle en boucle fermée |
| Arbre creux | Passage de câble ou de tube | Une construction propre et un service facile |
| Trajet thermique | Chauffage du cadre | Durée de vie plus longue et rendement stable |
| Bobinages sur mesure | Enroulement pour correspondre à l'entraînement | Haute efficacité et une course cool |
| Protocoles | CANopen, EtherCAT, PROFINET | Installation rapide dans votre ligne PLC |
| Un devoir difficile | Salle blanche, vide, IP, tolérant aux radiations, submersible | Courir dans des sites difficiles avec facilité |
L'aide du codeur
- Codeur absoluDémarrage en toute sécurité, pas d'homing, démarrage rapide.
- Codeur incrémentalLe système est simple et peu onéreux.
- Caractéristiques principales de la montre :
- Résolution en bits ou RPC
- Précision et répétabilité
- Interface de sortie et le bruit
Je fais correspondre les encodeurs de Renishaw, Heidenhain, Malade AG, Dynapar, Lika Electronic, Leine & Linde, Baumer, et Capteurs BEI. Je soutiens également résolveur la rétroaction pour la chaleur et les chocs.

Où l'utiliser
- Robotique: robots collaboratifs, bras robotiques industriels, effecteurs terminaux, robotique à entraînement direct, Entraînement harmonique articulations
- Robots mobiles: Solutions pour moteurs AGV et AMRs
- Médical: robotique chirurgicaleoutils, perceuses, prothèses, exosquelettes, et imagerie diagnostique comme CT et IRM
- Aérospatiale et défense: systèmes à cardan, surveillance, les gouvernes des aéronefs, systèmes de guidage, Les drones, cardan pour drone
- Automatisation industrielle: fabrication de semi-conducteurs, manipulation des gaufrettes, systèmes de vision, les systèmes de prélèvement et de placement, machines d'emballage, ATE
- Autres sites: moteur compatible avec les salles blanches, moteur compatible avec le vide, moteur tolérant aux radiations, moteur submersible, environnements difficiles
Choisir le bon kit : guide simple
| Vous demandez | Je vérifie | Ce que je choisis |
|---|---|---|
| Quelle est l'ampleur du couple ? | En continu et couple maximal | Pile droite et constante de couple |
| Quelle vitesse | RPM gamme et courbes couple-vitesse | Bâtons et fentes pour la vitesse |
| Comment serrer | Précision, répétabilité, résolution du codeur | Absolu ou incrémentale, optique ou magnétique |
| Quel espace | OD, ID, longueur, arbre creux | Moteur de taille réduite, moteur à faible poids |
| Quel site | 맞춤형 솔루션: vibration, la poussière, Indice de protection IP | Protection de l'environnement et l'étanchéité |
| Quel entraînement | Compatibilité des moteursbus, volts, ampères | Correspondre à lecteur/contrôleur, PID, FEU |
| Quelle vie | Durée de vie du moteur, MTBF | Cool run and right gestion thermique |
| Quel coût | Analyse coût-bénéfice | Personnalisation contre standard s'adapter |
Je prévois développement de moteurs prototypes, production en petites séries, et production en volume. I set options de connexion, longueurs de câble, et options de montage. I document spécifications techniques et notes d'application.
Mon écosystème : Je m'adapte à ce que vous utilisez
Je soutiens les lecteurs et les lignes de Kollmorgen, Maxon, Faulhaber, Portescap par Sensata Technologies, Tecnotion, Moog Inc., Parker Hannifin et Parker Electromécanique, Celera Motion (Novanta), et Allied Motion. Je synchronise avec Copley Controls et Elmo Motion Control. J'interface à Yaskawa, Mitsubishi Electric, Siemens, Fanuc, KUKA, Robots universels, et Stäubli systèmes. Je suis NEMA et CEI règles. Je rencontre EMI/EMC besoins.
Un coup d'œil rapide : tableau des performances
Densité de couple ██████████ 10/10
Maintien en position ██████████ 10/10
Mouvement fluide █████████ 9/10
Contrôle thermique █████████ 9/10
Taille de l'empreinte ██████████ 10/10 (une barre plus petite est préférable, une barre plus basse est excellente)
Remarque : votre score exact peut varier en fonction du modèle, de la charge et du site.
Pourquoi Jimi pour votre construction
- J'apporte expérience dans systèmes de contrôle du mouvement pour constructeurs de machines et OEM équipes.
- Je livre considérations relatives à la conception qui réduisent les risques.
- Je résous les défis de l'intégration des systèmes rapide.
- Je donne mon plein soutien à l'ingénierie de l'idée au terrain.
- Je vous aide à gagner un avantage concurrentiel avec des délais de mise sur le marché plus courts.
Vous voulez une voie toute tracée pour le mouvement linéaire aujourd'hui ? Voyez mes lignes :
- Découvrez les actionneurs linéaires électriques de haute précision avec la précision d'un servomoteur : Actionneurs linéaires électriques
- Ajoutez un retour d'information intelligent à votre système avec un contrôle étroit : Actionneurs avec retour de position
- Construire des étages de puissance compacts pour les mouvements OEM : Actionneurs de servomoteur
- Mouvements à l'échelle dans les plantes et les laboratoires : Actionneurs d'automatisation industrielle
Un coup d'œil sur la technologie
Je peux jumeler un moteur sans balais à courant continu sans cadre ou un moteur synchrone à aimant permanent sans cadre avec votre chargement. Je m'accorde Contrôleur PID et de fixer le contrôle sur le terrain. Je façonne le match d'inertie. I carte courbes de performance. Je vérifie répétabilité. Je vérifie réduction du bruit et réduction des vibrations. Je prévois résistance thermique chemins. Je garde avec Blindage EMI.
Je teste en salle blanche, vide, IP67, IP65La chaleur et les chocs. I set plage de température de fonctionnement. I noter le temps moyen entre les défaillances (MTBF). Je m'aligne sur classe d'isolation du moteur.
Je choisis la bonne résolution du codeur pour votre travail. Une articulation de robot a besoin de bits élevés. Un convoyeur a besoin de moins de bits. A moteur de cardan besoins Sin/Cos pour un mélange harmonieux. Un outil de laboratoire peut être nécessaire BiSS pour l'immunité au bruit.
Je fais correspondre la pile à votre contrôleur sur EtherCAT, CANopen, ou PROFINET. Je fais passer les câbles par un arbre creux. Je me monte sur le cadre avec de simples boulons. Je règle longueurs de câble et options de connexion qui s'adaptent à votre panneau.
Cas d'utilisation dans le monde réel
- UN robot collaboratif joint avec un moteur à entraînement direct et codeur absolu. Le bras démarre en toute sécurité, sans déplacement et sans risque de pincement.
- UN robot chirurgical outil à main avec un moteur sans fente et sans cadre. Il fonctionne en douceur et sans bruit. Il tient dans une coque étroite.
- Un AGV avec un servomoteur sans cadre kit et codeur magnétique. Il donne réponse dynamique élevée et maintient le couple sur les rampes.
- UN semi-conducteur stade de la plaquette avec intégration d'un codeur optique et moteur compatible avec le vide. Il frappe positionnement de précision avec haute répétabilité.
- UN cardan pour drone avec moteur à faible couple de cogging et codeur incrémental. Il rend la vidéo stable.
Ma promesse
Vous avez besoin de vitesse. Vous avez besoin d'espace. Vous avez besoin de contrôle. Je livre. Je construis moteur personnalisé sans cadre kits. Je conçois pour Intégration des moteurs OEM. J'apporte flexibilité de la conception. Je garde coût et performance en ligne. J'expédie à temps.
Je peux vous guider avec un guide de dimensionnement des moteurs et critères de sélection des moteurs. Je partage notes d'application et spécifications techniques. Je soutiens prototype, petit lot, et production en volume.
Lorsque vous souhaitez une élévation et une inclinaison, j'apporte des lignes complètes. colonnes de levage, Ascenseurs TVet le bureau debout de l'engrenage. Je peux attacher un moteur sans cadre avec encodeur à votre assemblages d'actionneurs pour que votre construction reste propre et rapide.
Résumé
- Sans cadre plus encodeur donne précision, pouvoir, et intégration transparente.
- Vous obtenez conception compacte, pas de réaction brutale, et haute efficacité.
- Vous gagnez contrôle en boucle fermée et un mouvement plus intelligent.
- Je vous aide à choisir et à construire. Je suis à vos côtés.
Références
- Kollmorgen. Guide de sélection des moteurs sans cadre à entraînement direct.
- Renishaw. Encoder Fundamentals and Applications Notes.
- Heidenhain. Encodeurs absolus et incrémentaux - Aperçu technique.
- Série IEC 60034. Normes relatives aux machines électriques tournantes.
- NEMA MG 1 - Moteurs et générateurs Guidance.
- Celera Motion (Novanta). Technologies des codeurs inductifs et optiques.
- Copley Controls. Notes d'application sur le réglage du FOC et des servos.
- Allied Motion. Guide d'intégration du moteur BLDC sans cadre.